At the beginning of 2019, a Menzi Muck M545 walking excavator was purchased in connection with the BMBF project ROBDEKON.
The actual goal is to automate the excavator so that locomotion and manipulation can be done remotely, autonomously or via sliding autonomy.
The excavator has a total weight over 12 tons and can theoretically destroy itself if not controlled correctly. With its highly mobile drive train all wheels can be used as legs, every wheel can change its height, orientation and angle. When lifting one virtual chassis axis, the excavator can step over trenches more than 3 meters wide. The end effector has a so-called tilt rotator unit and a quick-change mechanism for its tools, which makes the excavator highly flexible, precise and versatile. At some points, the pilot has to coordinate 4-5 motions simultaneously, which makes the control of the excavator complex and partly dangerous if one has no practice.
For this reason, the Robotics Innovation Center trained the involved people from the project as excavator pilots in an in-house seminar. On the one side, this knowledge is needed for a save and precise machine control, on the other side the knowledge is needed for the safety in automatizing this heavy and definitely no toy-12 ton machine. A safety-concept for the autonomous tests was developed in cooperation with the occupational safety staff in Bremen and partners from the ROBDEKON consortium.

Picture 1: The walking excavator demonstrates its drive train agility. (DFKI GmbH, photo: Felix Bernhard, DFKI) 
Picture 2: The Menzi Muck walking excavator in the sand pit (DFKI GmbH, photo: Felix Bernhard)
At this time, the project plans to use the automated excavator for two dangerous scenarios that are connected to the dismantling of dangerous waste deposits such as Kölliken, Morgenstern, Asse, Bonfol, etc. The excavator shall carry out soil- and hotspot sampling, because of the high risks that endanger the working personal in these locations. Depending on the kind of disposal site, for example, fire, explosion, poison, gas, self-igniting phosphor and magnesia may occur.
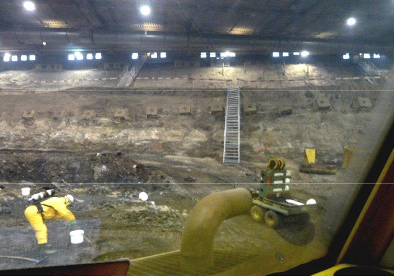
Picture 3: Manual soil probing at the waste depony Kölliken (source: smdk.ch, 2019) 
Picture 4: Barrel recovery and handling at Kölliken (source: smdk.ch, 2019)
The second scenario covers the gentle recovery of barrels in the context of dismantling works. Barrels are usually in a bad condition when found on a mostly illegal deposition site. The excavator shall recognize and recover them and handle them as single objects in a logistic chain afterwards. Today this work is done via remote control, which gives us a wide opportunity in optimizing the whole process.
For further information please visit and contact the following websites and persons:
- project coordinator: daniel.kuehn@dfki.de
- excavator coordination: felix.bernhard@dfki.de